
| chercheursduvrai.fr |
 Aide Aide
 Recherche Recherche
 Membres Membres
 Calendrier Calendrier
|
| Bienvenue invité ( Connexion (Log In) | Inscription (Register) ) | Recevoir à nouveau l'email de validation |

 To view this board in english, you must be registered.
To view this board in english, you must be registered.Excellent site trouvé, très fourni sur les contactés extraterrestres, à visiter : https://contactstellaire.fr

| Pages: (2) [1] 2 ( Aller vers premier message non lu ) |    |

|
Ecrit le: Jeudi 10 Décembre 2015 à 14h37


|
|
 Expert(e)  Groupe: Membres Messages: 310 Membre n°: 10787 Inscrit le: 15/08/2015 |
Merci pour ce topic qui sera très éducatif j'en suis sûr.
J'espère pouvoir contribuer aux connaissances car je compte réaliser prochainement aussi la même chose que je nommais "table de traçage électronique multi-têtes" qui correspond à ton TriPod avec tête adaptable (je comptais mettre un crayon rétractable en plus d'un minicroscope numérique pour d'autres besoins) Beau projet en tout cas, courage pour la suite  -------------------- « Rien ne change tant qu'on n'y change rien »
|
 

|
|
Ecrit le: Jeudi 10 Décembre 2015 à 14h38
|
|
 Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Bienvenue dans l'aventure alors
 -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Jeudi 10 Décembre 2015 à 14h55
|
|
 Expert(e) Groupe: Membres Messages: 371 Membre n°: 10456 Inscrit le: 01/12/2013 |
Bonjour,
Un interpréteur g-code sur Arduino, très intéressant. Cela va me rappeler quelques souvenirs, j'avais réalisé un interpréteur IEEE488.1 sur 51 il y a une 20aine d'années pour un appareil de mesure. Cela fera encore un sujet que je vais (au minimum) suivre. A+ JCV -------------------- "Face à un problème complexe, il convient de commencer l’approche analytique par la solution la plus simple."
Expression dérivée du principe du Razoir d'occam. William d’Ockham - théologien Franciscain 1285-1349. |
|
|
|
Ecrit le: Samedi 12 Décembre 2015 à 14h18
|
|
|
Expert(e) Groupe: Membres Messages: 371 Membre n°: 10456 Inscrit le: 01/12/2013 |
Bonjour,
En regardant les commandes du g-code, il me semble que certaines de ces commandes comme la G5.x seront peut-être un peu lourde en exécution sur un Arduino. Il faudra peut être les calculer sur PC et ne transmetre que des commandes de base. ici un résumé des commandes g-code : http://linuxcnc.org/docs/html/gcode_fr.html Voir ici: http://linuxcnc.org/docs/html/gcode/gcode_fr.html Je vois que la structure mécanique de la CNC prends forme. A+ JCV -------------------- "Face à un problème complexe, il convient de commencer l’approche analytique par la solution la plus simple."
Expression dérivée du principe du Razoir d'occam. William d’Ockham - théologien Franciscain 1285-1349. |
|
|
|
Ecrit le: Samedi 12 Décembre 2015 à 18h25
|
|
 Expert(e) Groupe: Membres Messages: 3939 Membre n°: 10047 Inscrit le: 07/11/2011 |
@JCV : je ne suis pas sûr que Colas07 écrive lui même l’interpréteur G-Code, mais peut-être (comme il le mentionne) il utilisera une librairie ou un kit déjà préparé (ce qui n'est pas un mal => http://www.civade.com/post/2014/01/02/Arduino-et-GRBL-l-incontournable-solution-pour-piloter-une-petite-CNC || l'arduino CNC Shield full compatible avec la librairie GRBL Arduino : http://www.ebay.com/itm/Arduino-CNC-Shield...s-/281670664172 ).
Un petit forum : http://www.usinages.com/threads/grbl-arduino-uno-et-cnc-shield.73836/ Je trouve l'idée du tripod CNC sympathique, et l'idée d'utiliser les billes de souris caoutchouc une très bonne idée. Bien vue ! -------------------- « No matter where you are, Look for the brightest star, Believe it is true, My soul is smiling at you", FastWalkers
|
|
|
|
Ecrit le: Samedi 12 Décembre 2015 à 19h04
|
|||
|
Expert(e) Groupe: Membres Messages: 371 Membre n°: 10456 Inscrit le: 01/12/2013 |
Bonsoir BlueDragon, Effectivement c'est très intéressant, je ne connaissait pas cette librairie. c'est fou le nombre de chose qui ont été faites avec de l'Arduino. A+ JCV -------------------- "Face à un problème complexe, il convient de commencer l’approche analytique par la solution la plus simple."
Expression dérivée du principe du Razoir d'occam. William d’Ockham - théologien Franciscain 1285-1349. |
||
|
|
|
Ecrit le: Mardi 15 Décembre 2015 à 14h06
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
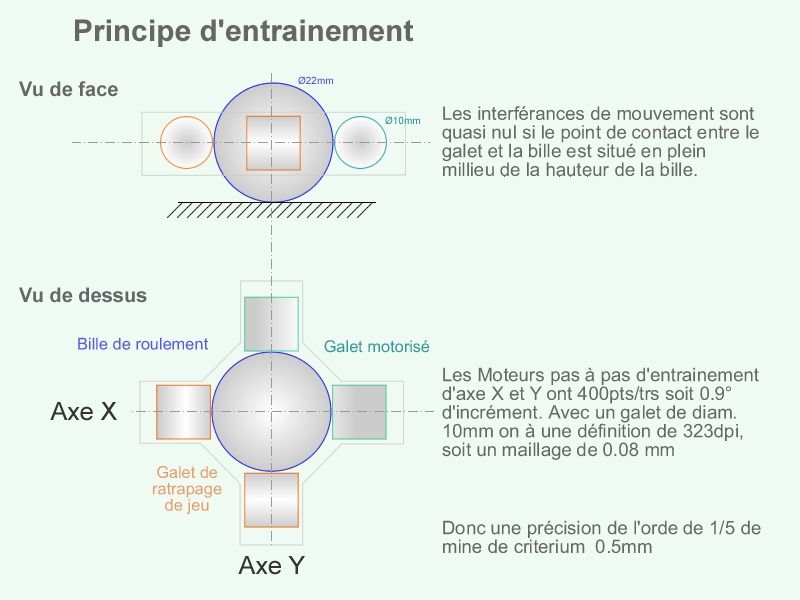
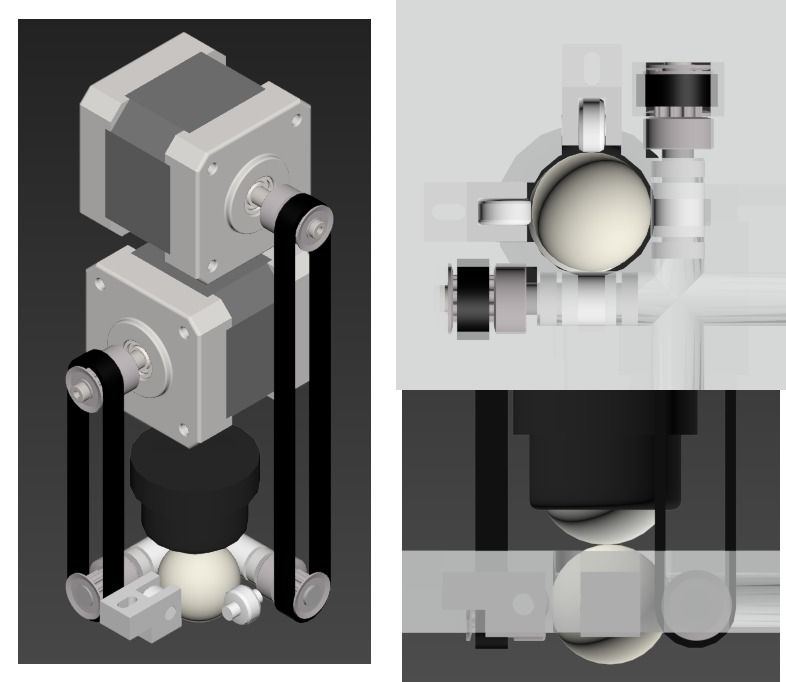
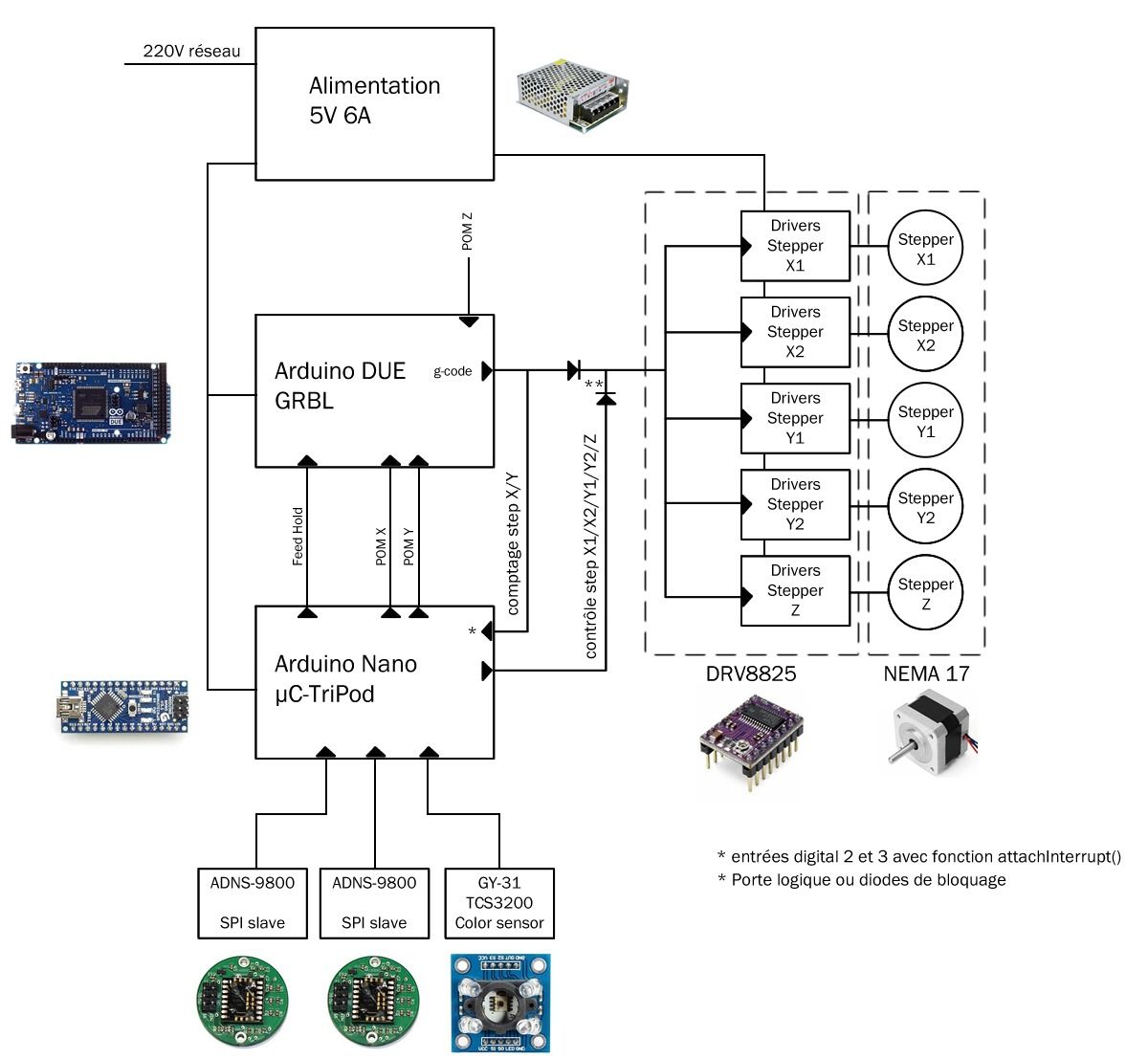
Synoptique des éléments électriques du TriPod :
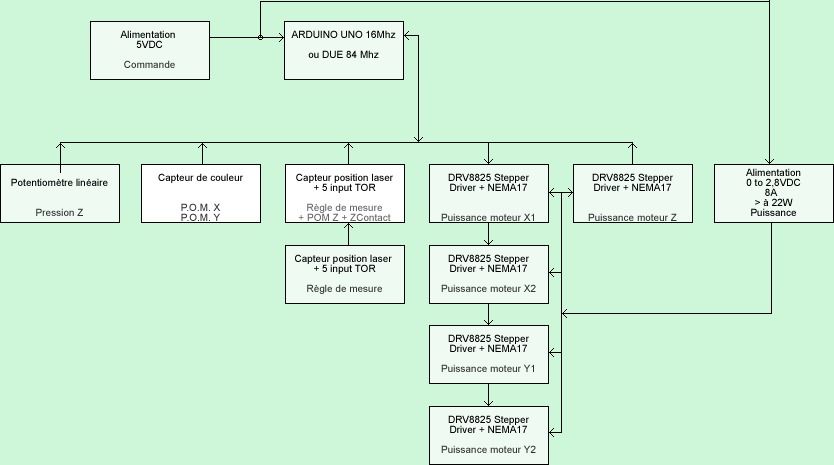 -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Jeudi 17 Décembre 2015 à 10h50
|
|||
|
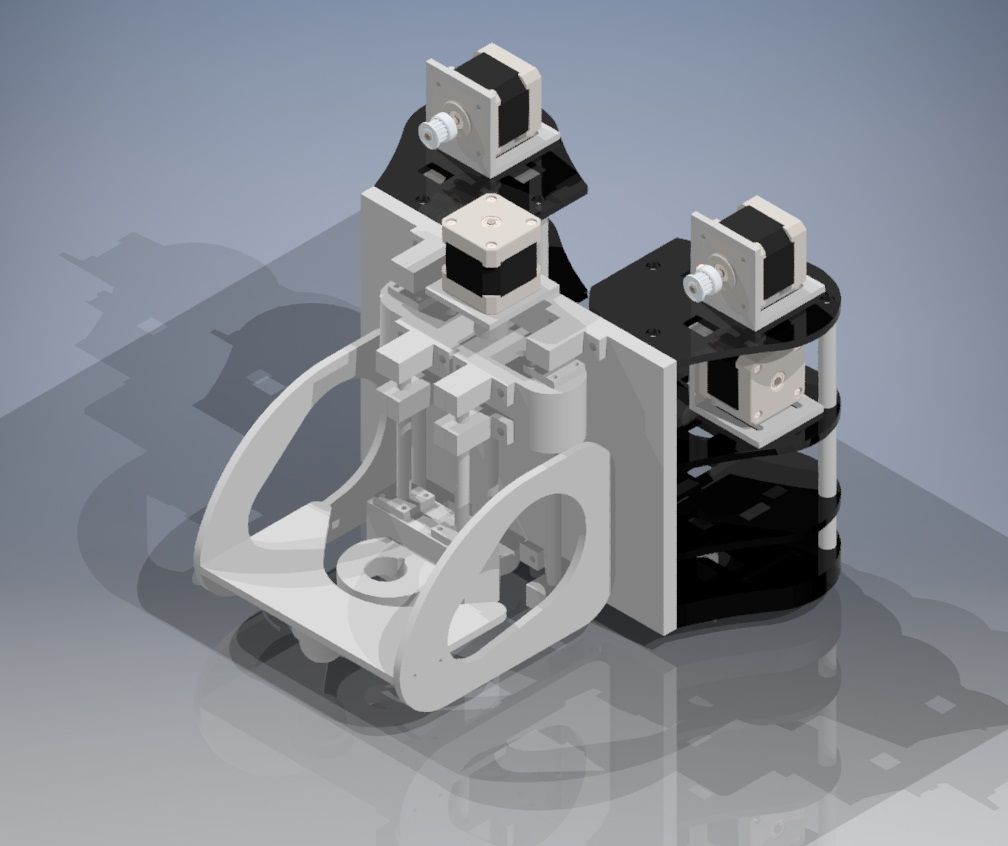
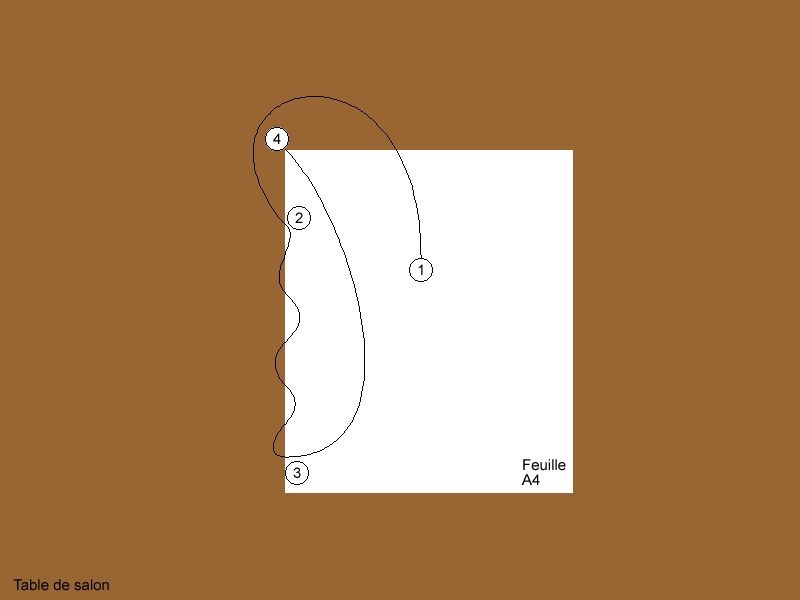
Expert(e) Groupe: Membres Messages: 371 Membre n°: 10456 Inscrit le: 01/12/2013 |
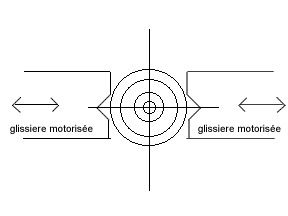
Bonjour, Effectivement ce logiciel donne une présentation "magnifique" du projet. En quoi vont être réaliser les différentes pièces de cette mécanique ? Comme il y a un décalage entre la position X, Y de la tête et les positions X1,X2 et Y1,Y2 des boules de déplacement, je sens qu'il va y avoir pas mal de calcul à faire pour bien positionner la tête. A+ JCV -------------------- "Face à un problème complexe, il convient de commencer l’approche analytique par la solution la plus simple."
Expression dérivée du principe du Razoir d'occam. William d’Ockham - théologien Franciscain 1285-1349. |
||
|
|
|
Ecrit le: Jeudi 17 Décembre 2015 à 14h01
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Sur la 3D y sont modélisées deux types de pièces :
- des pièces qui seront achetées (roulement linéaire, vis et noix en bronze, glissière....) - des pièces qui seront usinées dans du plastique PEHD Noir épaisseur 15mm J'ai de la chute à gogo au boulo suite à une erreur du patron lol Toutes les pièces seront donc usinées sur une fraiseuse HURON EX avec commande CNC de la marque HEIDENHAIN.  quand les pièces ont une taille supérieur au 15mm d'épaisseur du PEHD Noir, la pièce est découpée en tranche et elle est donc construite en plusieurs couches... -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Vendredi 18 Décembre 2015 à 10h03
|
|
|
Expert(e) Groupe: Membres Messages: 3939 Membre n°: 10047 Inscrit le: 07/11/2011 |
Hello,
L'idée prend forme et tu maîtrises visiblement l'outil CAO, c'est chouette ! Voilà quelques idées suggestion en vrac : - comment s'assurer que quand le robot doit aller tout droit, qu' il va bien droit ? Comment tu verifies l'écart entre l'origine et le point le plus loin ? (Dérive dû aux frottements, aux forces, etc) - comment geres tu la taille de la surface à traiter et la compensation dû à la dérive dans l'éloignement à l'origine (même point que plus haut) - pour le point d'origine, pourquoi ne pas utiliser un martyr (feuille à imprimer) qui te servirait de repère pour le capteur et calculer les dérives + un repère pour l'utilisateur pour qu'il place sa feuille ? Joli projet, A+ -------------------- « No matter where you are, Look for the brightest star, Believe it is true, My soul is smiling at you", FastWalkers
|
|
|
|
Ecrit le: Vendredi 18 Décembre 2015 à 11h13
|
|||||
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
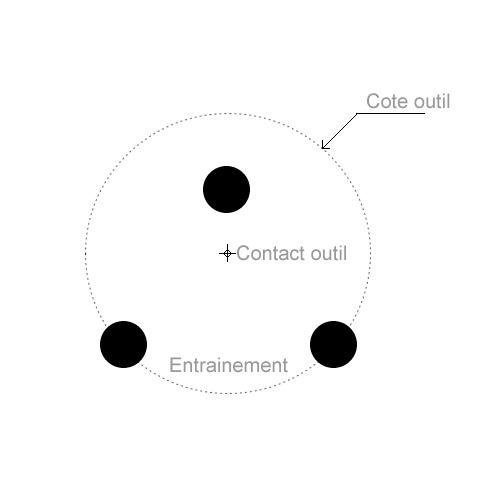
Donc si je comprend bien la question, comment je suis sur que la trajectoire demandé à bien été réalisé ? ou en d'autre terme, comment je suis sur que chaque pas moteur est réalisé correctement électriquement et que aucun pas moteur n'a glissé ? C'est la que les capteur laser de souris entre en jeu, il y deux choses que les capteurs de souris doivent réaliser :
Le TriPod sera équipé de deux capteur ADNS-6xxx, ces deux capteur seront placé à deux extrême du TriPod. cela va me permettre de comparer les deux flux d'information du capteur et de voir si le TriPod à tourné sur lui même car les deux moteur de déplacement X (tourelle-d'entrainement-gauche et tourelle-d'entrainement-droite) sont pas synchrone dans le poussées de déplacement. Sur la fin du projet je vais me pencher sur la faisabilité d’utiliser la rotation du TriPod avec comme centre de rotation sur le point de contact de l’ustensile comme un "axe C" ; Dit autrement, Le TriPod pourrait tourner sur lui même pour orienter une lame de scalpel et procéder à des découpes...
Pour 5€ chez banggood on peut avoir un GY-31 TCS3200 Je pense que ta solution couterai pareil... mais serai bien plus simple à programmer. Par contre cela rajoute qqchose de matériel à transporter en plus... et c'est moins drôle à voir et à utiliser...alors soyons fou ! d'après ce que j'ai pu découvrir pour le moment ( vite fait donc pas sur... ) le GRBL ( l’interpréteur de commande G-code dans l'arduino ) ne va pas être facile à reprogrammer pour remplir les nouveautés que je souhaite... Je pense qu'il va être plus facile de placer un arduino Nano en plus qui va gérer l’acquisition des POM XY et la mesure d'écart de poursuite...qui transmettra au GRBL des ordres du genre POM = ok !, Pause Programme ! compense un glissement !... Ensuite j'ai découvert GRBL-Panel Solution libre de communication avec GRBL créer en VisualBasic2015 exactement ce qu'il me fallait ! 6 mois de gagné... 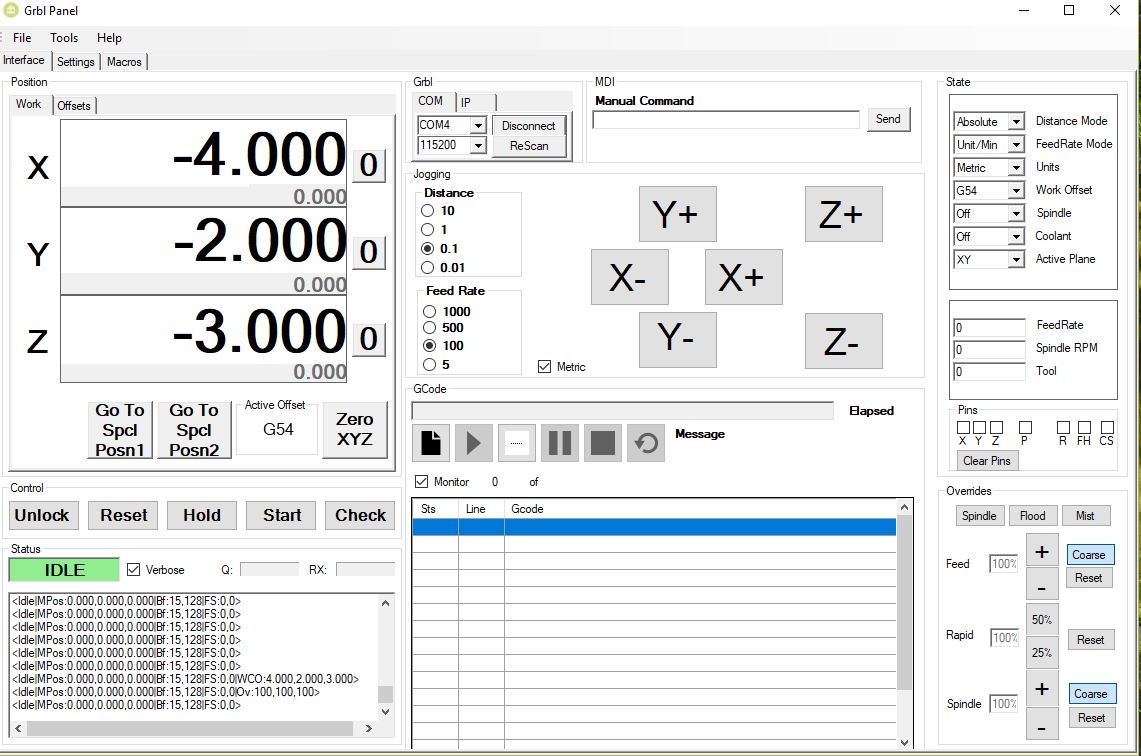 -------------------- Votre colas qui vous aimes.
|
||||
|
|
|
Ecrit le: Vendredi 18 Décembre 2015 à 13h36
|
|
 Expert(e) Groupe: Membres Messages: 255 Membre n°: 2 Inscrit le: 07/08/2002 |
C'est un excellent projet. Je trouve qu'il est bien pensé; et a une utilité dans le monde de la conception 3D en open source. Bravo! Je plussoie!!
Je lirai ça avec plaisir de temps à autre. -------------------- "Détourne-toi des préceptes de ceux qui spéculent sur le monde, mais dont les idées ne sont pas confirmées par l'expérience."
Léonard de Vinci |
|
|
|
Ecrit le: Vendredi 18 Décembre 2015 à 14h58
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Merci P.
Le GRBL est un interpréteur de commande G-code placé dans un arduino. En faite tout le code source GRBL est programé en C, il est compilé par le logiciel arduino mais on ne peut rien programmer en langage arduino en C++ dans le GRBL.... Du coup pour rajouter toutes les fonctions que j'ai besoin pour que mon tripode fonctionne correctement j'ai deux solution : 1) soit je programme en C en modifiant le code source GRBL pour y intégrer mes particularités... mais du coup plus possible de prendre les futurs mise à jours GRBL sans tout revoir...dommage... 2)Soit du coup j'opte pour une gestion indépendante avec un autre microcontrôleur et une communication ! es ce possible ? Ce qui est super cool avec le GRBL c'est qu'il est comme une machine outil, donc il y à une fonction FEED HOLD en A1. FEED HOLD ca permet d’arrêter la machine doucement sans perdre la position step motor X / Y donc le 2emme microcontrôleur, un arduino nano, pourra mettre en pause le GRBL... Une fois le GRBL en pause il pilotera les drivers stepper X/Y directement sans perturber le GRBL. l'arduino Nano pourra faire les POM et simuler au GRBL l'aquisition de la POM X et Y avec uniquement des E/S digital... l'arduino nano aura des entrées interupt de comptage des imputions de commande GRBL des stepper X/Y il pourra les comparer au information des deux ADNS-6 pour le calcule de l'erreur de poursuite et la mise en feed hold pour correction du glissement. -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Vendredi 18 Décembre 2015 à 22h30
|
|||
|
Expert(e) Groupe: Membres Messages: 3939 Membre n°: 10047 Inscrit le: 07/11/2011 |
Hello, Il faut comprendre qu'un Arduino UNO ou MEGA, c'est avant tout un contrôleur USB/programmeur avec la puce ATMEGA 328P (pour le UNO) ou ATMEGA2560 (pour le Arduino MEGA) + des quartz pour permettre de tourner à 16Mhz (ou 20Mhz mais c'est moins stable). Donc si tu achètes un arduino UNO ce qui est intéressant, c'est qu'il a une connectique USB et tu peux t'en servir comme plateforme de programmation de puce ATMEGA (voir page 51 d'un de mes logbook, ici ). Finalement, une puce ATMEGA ça marche tout seul à 8Mhz sans aucun quartz externe, et ça monte à 16Mhz avec des quartz externe. Partant de là, tu peux déjà apprendre à configurer les fuse et acheter deux / trois puces ATMEL ATMEGA 328P ou ATMEGA 2560 pour te faire "plusieurs Arduino" (ça se programme pareil après). Tu pourras même te simplifier la maintenance en achetant des µC au format 'DIP' et partir sur un ATMEGA 1284P. Ton tout ça pour dire que tu peux multiplier les petits pains "Arduino" à moindre frais en apprenant à faire du ATMEGA onboard et à programmer les fuse. L'astuce pour multiplier les petits pains est de s'inscrire chez ATMEL avec le mail de ton boulot, qui devrait te permettre (si le domaine est connu) de comander des samples gratuitements. En croisant les doigts, tu peux avoir des puces gratos directement de chez ATMEL USA gratuitement (ou moyennant la douane si la douane intercepte le colis). (ATMEL 1284P : 6€ chez farnell http://fr.farnell.com/atmel/atmega1284p-pu/micro-8-bits-avr-128k-flash-40pdip/dp/1715481 voir 8€ chez radiospare http://fr.rs-online.com/web/p/microcontroleurs/7193932/?origin=PSF_430995|acc) Bref, ça c'est cadeau pour ton joli projet DIY. Enfin concernant la communication; Il existe plusieurs protocoles de communication grâce aux librairies sur Arduino. Les plus connues sont Serial, SPI et I2C. Chacune à ses spécificités et inconvénient. Je pense que tu les connais déjà, mais au cas où : En mode SPI, ça prend pas mal de ports, et c'est basé sur le principe maître/esclave parallélisés :  En mode I2C (protocole de Philipps), c'est plutôt un mode "Bus" où tout le monde est au même niveau et discutent entre eux via des adresses :  Un article qui présente le pour et contre des deux solutions : http://www.byteparadigm.com/applications/introduction-to-i2c-and-spi-protocols/ Pour le Serial, c'est le plus simple puisque finalement, ça sert principalement à échanger des messages en format "ASCII". Chaque protocole a son usage. Disons que sur Arduino, si tu utilises le Serial, tu peux plus debugguer via le port USB. Si tu utilises I2C ou SPI, ça utilise des ports en plus et génère des interruptions. C'est un choix à faire, et il n'y a pas de bon ou mauvais choix je pense, juste une affinité sur la manière de faire. Si tu as des questions, poses les, mais je pense que tu maîtrises tout ceci vu ce que tu as fais avec le glovePS4 Voilou ++ -------------------- « No matter where you are, Look for the brightest star, Believe it is true, My soul is smiling at you", FastWalkers
|
||
|
|
|
Ecrit le: Mercredi 23 Décembre 2015 à 08h32
|
|
 Expert(e) Groupe: Modérateurs Messages: 4027 Membre n°: 181 Inscrit le: 07/10/2006 |
Très intéressant ce projet !
Tu as un bon reflex de préférer les drivers de moteur TEXAS il sont bien meilleur que les ALLEGRO. -------------------- Chaque minute qui passe est une occasion de changer le cours de ta vie.
Page YouTube, Page Dailymotion, Album Picasa, La Force contre-électromotrice, simulation magnétique, Viktor Schauberger |
|
|
|
Ecrit le: Samedi 19 Mars 2016 à 14h14
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
achat des pièces pour juin..
-------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Jeudi 02 Juin 2016 à 23h56
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
une partie des pièces à été commandé, j'ai aussi trouvé une entreprise qui est ok pour m'usiner les pièce gratos...
@++ -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Jeudi 21 Juillet 2016 à 22h00
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
voici la liste des pièces qui ont été commandé :
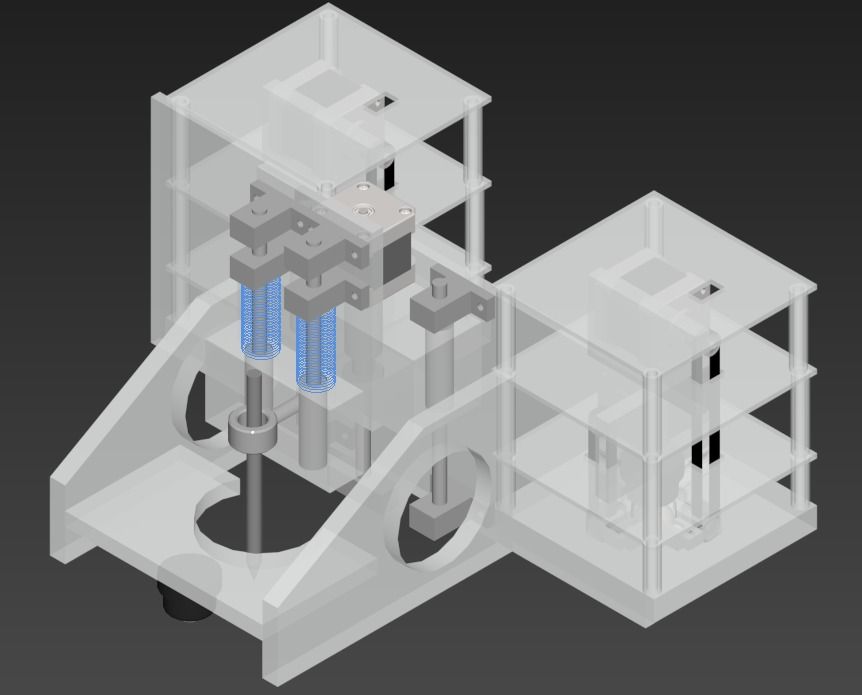
 5 Pcs 3D Printer Stepstick DRV8825 Stepper Driver Reprap 4 Layer PCB x2 €17.16  ATmega328P Nano V3 Controller Board Compatible Arduino Improved Version x4 €10.08 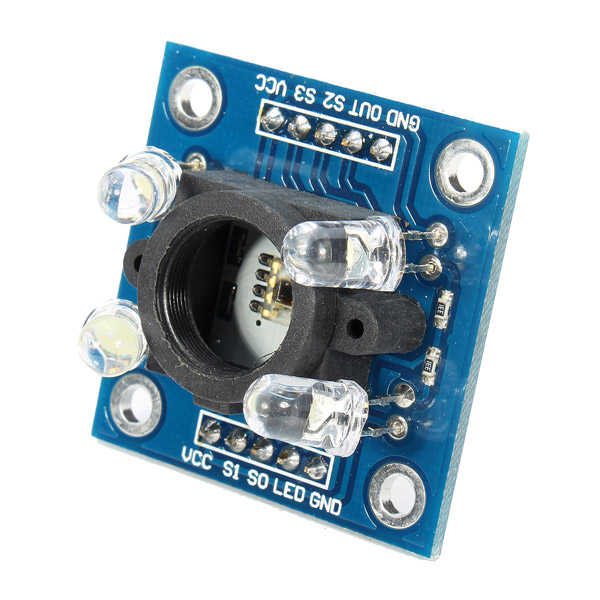 GY-31 TCS3200 Color Sensor Recognition Module For Arduino x2 €9.04  24V 5A 120W Switch Power Supply Driver For LED Light Strip 110V/220V x1 €14.17  6mm x 8mm Aluminum Flexible Shaft Coupling OD19mm x L25mm CNC Stepper Motor Coupler Connector x2 €3.34  150mm Lead Screw 8mm Thread Stainless Steel Lead Screw with Flange Brass Nut x1 €3.68  8mm Bore Diameter Pillow Block Mounted Ball Bearing KP08 Zinc Alloy x2 €4.94  LMK8UU 8mm Square Flange Type Straight Line Linear Bearing x8 €18.00  Outer Diameter 8mm x 300/380/400/500mm Cylinder Liner Rail Linear Shaft Optical Axis x4 €13.68  SK8/10/12/16 Linear Rail Shaft Support XYZ Table CNC Router x8 €8.72 Radiospares : Ressort de compression, RS Pro en Alliage d'acier, 45.5mm x 10.8mm, 0.49N/mm Code commande: 751-556 Quantité: 2 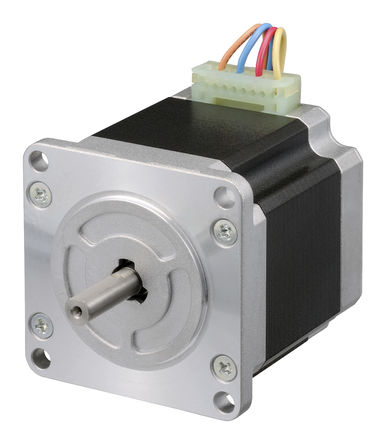 Moteur pas à pas Bipolaire Axe simple, 1.0nm 1.8°, 4 fils, 24 V c.c. Code commande: 878-7777 Quantité: 5  Poulie pour courroie crantée PC renforcé de fibre de verre 20 dents , pas de 2.032mm, alésage 6mm Code commande: 778-4825 Quantité: 8  Courroie crantée RS Pro Code commande: 778-5095 Quantité: 4 gotronic : 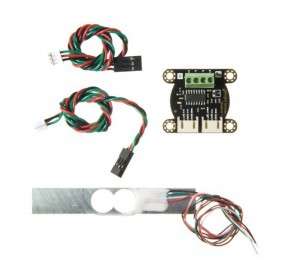 Capteur de force 1 kg + interface SEN0160 Quantité: 1 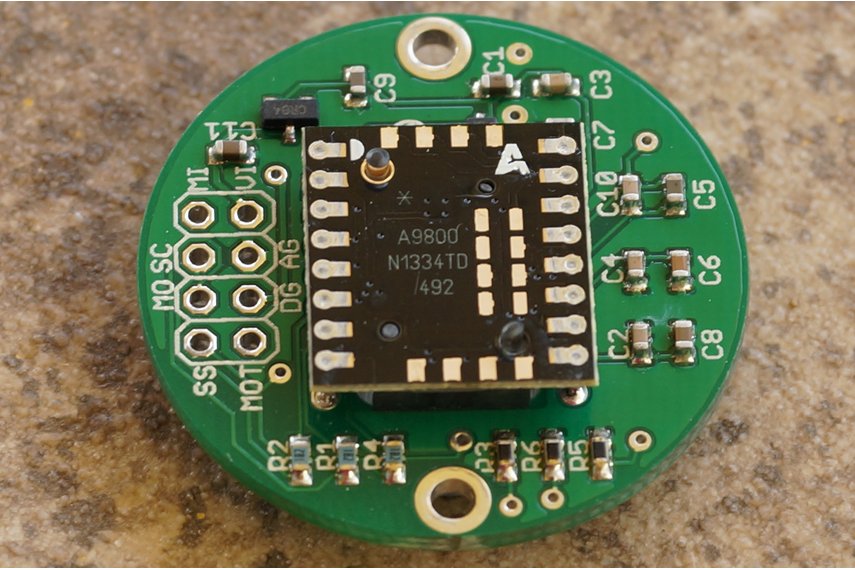 ADNS-9800 Laser Motion Sensor Quantité: 2 j'ai apporté des modification à la géométrie entre les éléments pour avoir accès à d'autre application type impression 3D ( ne pas enfermer la tête dans un carénage. 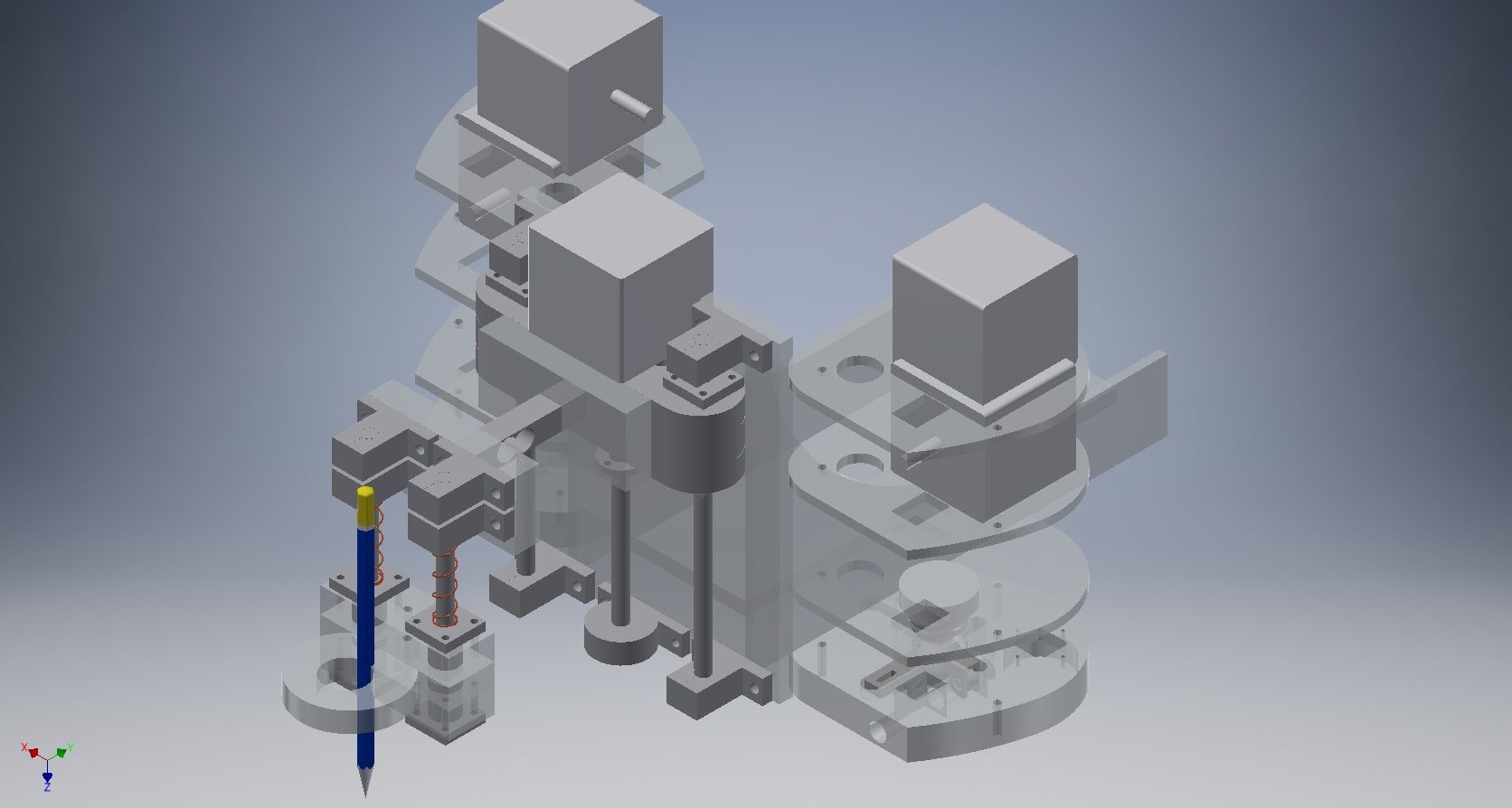 à l’arrière on trouve de la place pour embarquer l’électronique de puissance 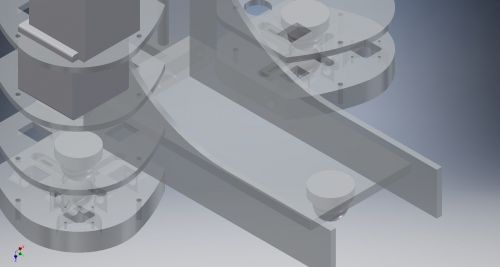 J'ai prévu des emplacement pour les capteur de position ADNS9800 pour le calcul d'erreur de poursuite.  + + un capteur de force monté comme suit : 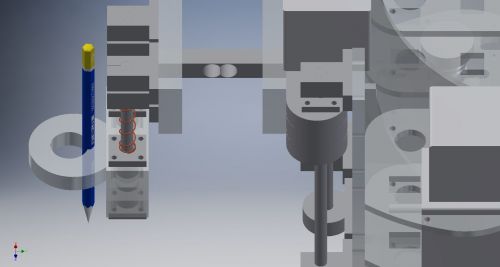 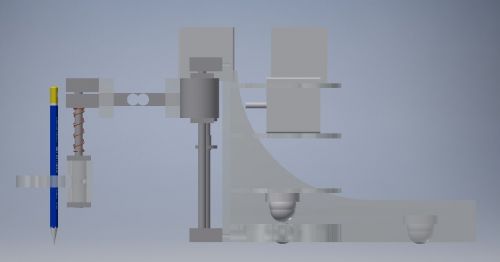 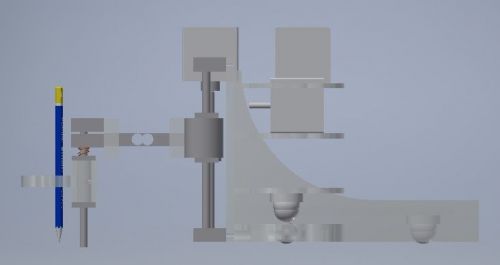 @++ -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Dimanche 31 Juillet 2016 à 00h00
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
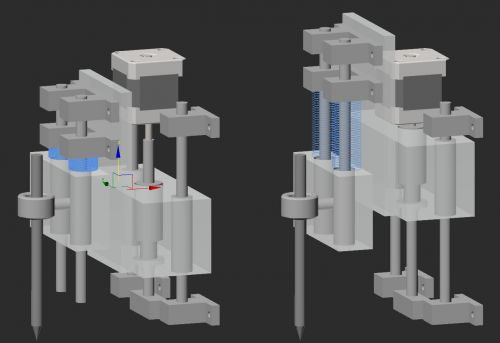
Salut,
voici les dernières mise à jours de 3D. 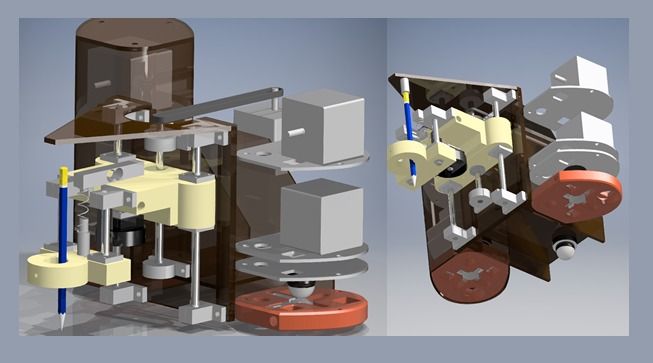 Nouveauté ! j'ai mis en place un contre poids pour compenser le poids de l'ensemble porte crayon. Si cela n'est pas en place la nuance gris la plus claire, serai du poids du porte crayon.... c'est déjà trop lourd pour moi... maintenant dans ces condition avec le contre poids et le capteur de force, le Tripod mesurera quasi au gramme près, et cela avec une amplitude de 1g à 800g de nuance de gris. Le contre poids dois faire entre 10 à 20% de plus que le poids du porte crayon car le capteur de force ne prend pas les effort négatif il fonctionne que dans un sens de mesure... 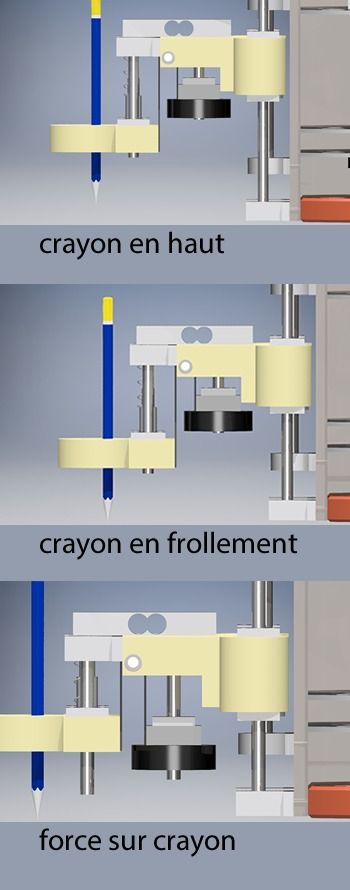 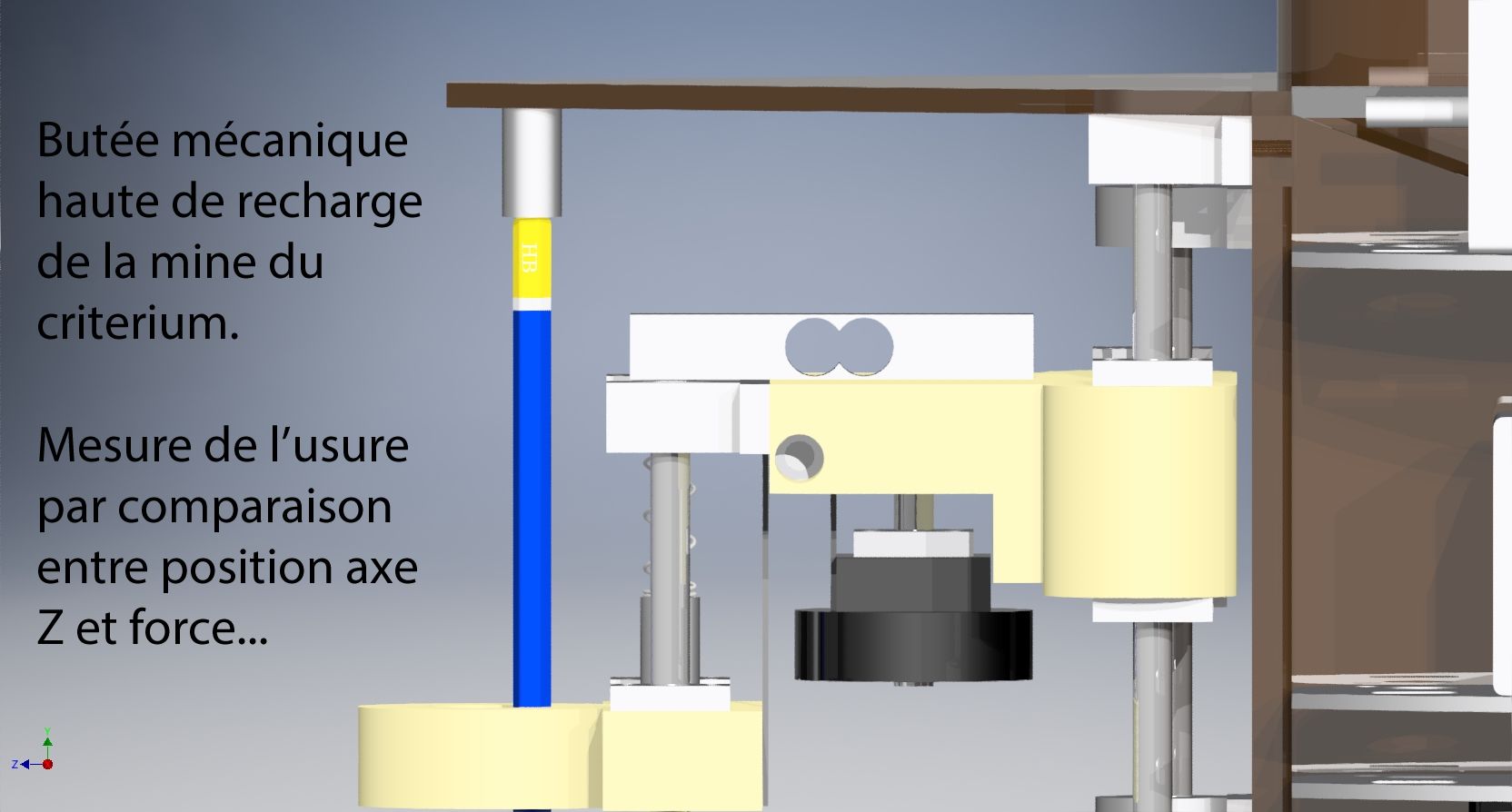 La quasi totalité des pièces sont arrivées. Je galère à trouver ou usiner mes pièces, on à pas de machine avec CN au boulo en ce moment...et en plus chez nous trouver des outil à mettre dans la machine c'est la galère... j'ai que du conventionnelle sous la main. L'entreprise qui m'a dit être ok, a aussi dit, quand j'aurai le temps... donc je cherche... -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Mardi 02 Août 2016 à 20h05
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Le plan d'usinage des deux socles de tourelles d'entrainements à été envoyé pour usinage dans une entreprise qui se nome HARO située dans le 67, une entreprise familiale qui fait de la mécanique de précision. Elle est donc équipé de centre d'usinage comme il faut. Le jeune homme qui étais présent pendant ma réparration, dans le cadre de mon travail à gentillement accepté de me filer ce coup de main, d'usinage....
MERCI ! a HARO ! c'est beau ! Merci aussi à la loi de l'attraction qui à réglé ce problème qui m'a hanté toutes la semaine passé ! c’était les seul pièces du projet qui demande de la rigueur, de la précision.... c'est le cœur de transmission de puissance mécanique après tout.... 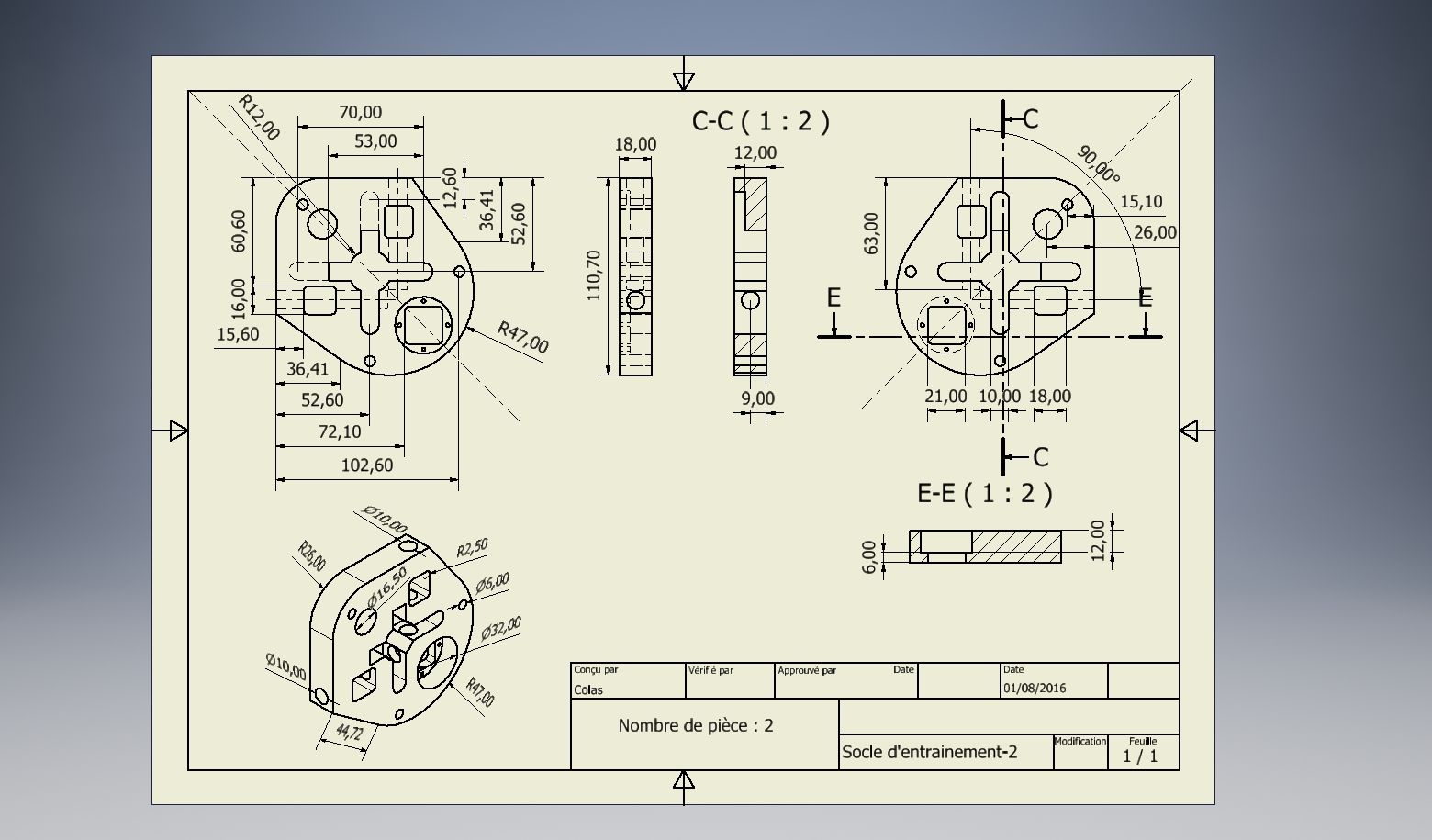 J'ai trouvé du brut pour chaque pièces. y a plus qu'a suivre les plans.... -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Mardi 02 Août 2016 à 20h55
|
|
|
Expert(e) Groupe: Membres Messages: 3939 Membre n°: 10047 Inscrit le: 07/11/2011 |
Tu fais du bon boulot, bravo ! j'ai trouvé plutôt bien pensé le coup du poid pour régler la force sur la mine de crayon et la butée pour le criterium. Excellent !
-------------------- « No matter where you are, Look for the brightest star, Believe it is true, My soul is smiling at you", FastWalkers
|
|
|
|
Ecrit le: Lundi 08 Août 2016 à 19h15
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Merci blue ! oui je fais de mon mieux pour que ce pti'robot claque à mort
.Voici les dernières avancées et pas des moindres puisque l'on commence à rentrer dans le vif du sujet avec du Réel ! Je suis extrêmement excité et plein de joie de vous présenter l'axe Z bien avancé : 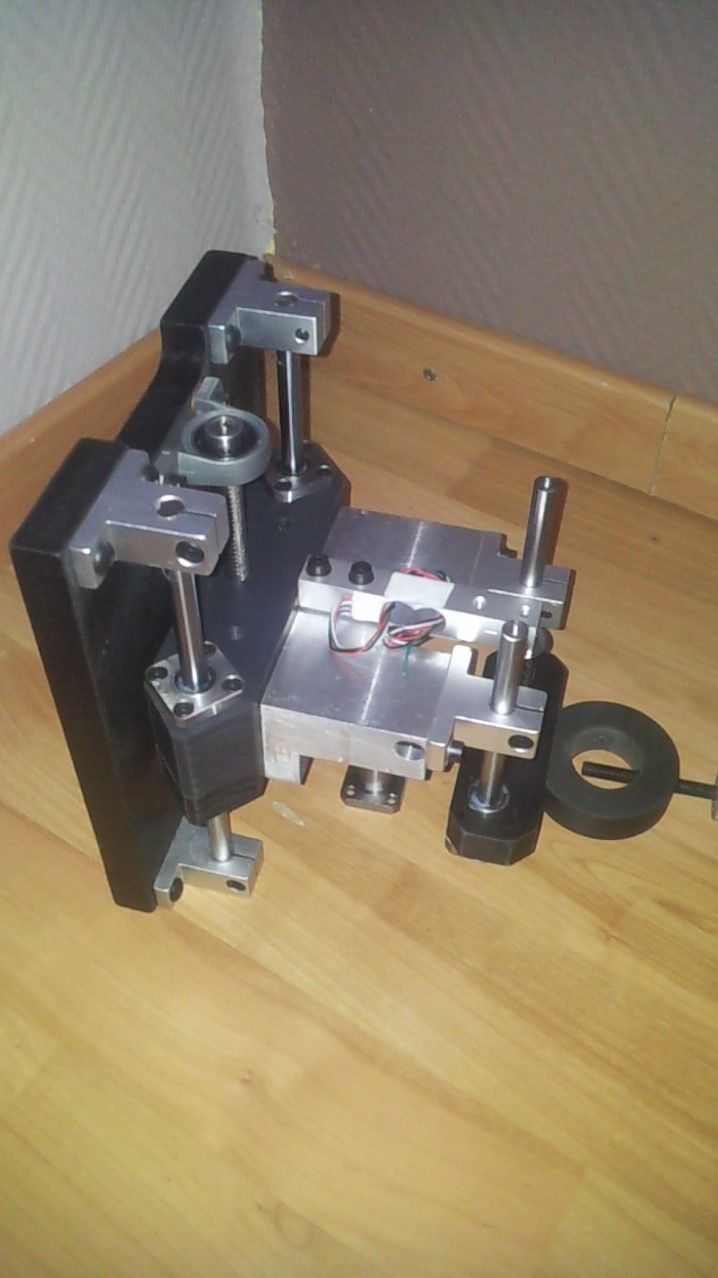 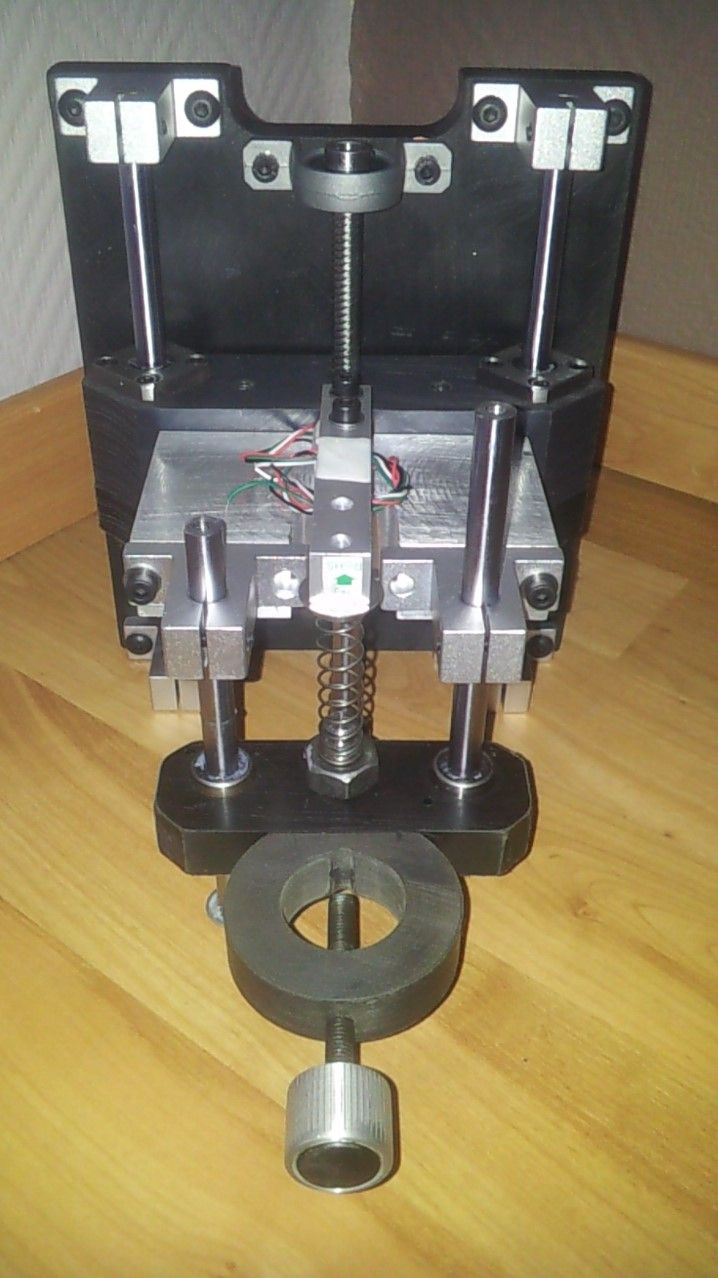 Je n'ai pas de défaut par rapport à mes plans de départ, chaque pièces trouve sa place sans surprise. J'ai assemblé toutes les pièces banggood et j'ai usiné les pièces sur un tours et une fraiseuse conventionnel (sans CNC) avec des règles de mesure et une visu au centième de mm. Les rails de guidage ainsi que la vis ont été positionné bien parallèle ! Il n'y à pas de friction, pas de dur ! tout au long de la course. je développerai dans une vidéo, les méthodes de réglage d'alignement géométrique, ainsi que les moyens de vérifications et cela avec de l'outillage de précision et aussi des méthodes sans. Un mauvais alignement diminue la durée de vie des roulements et de la noix en bronze de la vis. Une fois amorcée l'usure est exponentiel. Très rapidement vous avez du jeu indésirable qui nuit à votre impression 3D par exemple (jeu à l'inversion, crabe du chariot) Pour pouvoir poursuive, il y à les sous ensembles "contre poids" et "recharge mine" qu'il me reste à finir. @++ -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Mardi 09 Août 2016 à 20h14
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
CNC shield soudé = ok
je dois suivre la procédure de contrôle et de réglage de la limitation en courant des drivers DRV8825 pour moteur pas à pas. puis reste à tester avec un arduino avec GRBL installé. il y a quand même pas mal de chose à contrôler et à mettre en place pour que le GRBL fonctionne. Les fins de course, les capteurs de POM, l'info enable... Il y a aussi le refroidissement à voir, les radiateurs sur les drivers, le ventilateur ( j'en ai pas pour le moment !!!!) de toute façon j'ai pas encore les tourelles d'entrainement.... donc je vais me concentrer sur l'axe Z en priorité... les autres moteurs seront encore en volant au début... trop HS ce soir pour faire du bon travail... je repousse car ma fille m'a épuisé, elle à moins de deux mois...donc quand elle est râleuse, j'en prend pour mon grade ! MDR -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Mardi 09 Août 2016 à 22h55
|
|||
|
Expert(e) Groupe: Membres Messages: 3939 Membre n°: 10047 Inscrit le: 07/11/2011 |
Félicitation au papa oui ça demande beaucoup d'énergie, et ça t'en redonne plein plus tard  la plus grande difficulté pour un nouveau papa je trouve, c'est de trouver un nouvel équilibre avec le nouveau bout de chou Bell réalisation, courage pour la suite ! -------------------- « No matter where you are, Look for the brightest star, Believe it is true, My soul is smiling at you", FastWalkers
|
||
|
|
|
Ecrit le: Mercredi 17 Août 2016 à 18h41
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
tout à fait d'accord pour ce nouvel équilibre. j'ai 3 frères et 3 sœurs, je suis le plus grand donc je connais mon rôle et ma place
j'ai eu des souci en passant l'aspirateur dans ma pièces : chute du module axe Z qui étais en équilibre et résultat capteur de force complètement tordu ! je l'ai remis droit mais il est mort ! la mesure c'est ou : 0 ou 99999 j'en ai commandé deux autres pour 10€ les deux... deux semaines d'attente. les socles d'entrainements ont été commandé ! il sont en cours de découpe au jet d'eau puis ils doivent être fraisé... délais deux semaines. je pars avec mes amours dans le sud, 1 semaines du 26/08 au 04/09...il risque de ne pas y avoir de coup de fouet dans le projet avant mi-sept... ensuite je vais en formation chez siemens à Lyon, 1 semaines. je serai bloqué à l’hôtel tous les soirs.... je pense que je pourrai faire de la programmation tous les soirs. Sinon j'ai pu faire bouger mon axe Z avec le GRBL et ainsi me familiariser avec les paramètres et le logiciel. Enfin mon galaxie S2 à rendu l’âme ! donc pour les vidéos et les photos c'est beaucoup plus chiant... je dois apprendre à me servir d'un Iphone, snif cela va normalement à l'encontre de mes principes, mais bon j'en récupère un avec écran fissuré gratos, je vais pas cracher dessus... @++ -------------------- Votre colas qui vous aimes.
|
|
|
1 utilisateur(s) sur ce sujet (1 invités et 0 utilisateurs anonymes)
0 membres:
 Pages: (2) [1] 2 Pages: (2) [1] 2 |
|
[ Script Execution time: 0.1039 ] [ 12 queries used ] [ GZIP activé ]